Équation de Fisher
C'est un modèle d'évolution de population (évolution d'un gène dominant), un cas particulier des équation KPP (Kolmogorov-Petrovsky-Piskounov) :
\[\frac{\partial u}{\partial t} - \frac{\partial^2 u}{\partial x^2}= u(1-u) \qquad (t,x)\in\mathbb{R}^+\times\mathbb{R}\]
Propriétés : existence de front d'ondes stationnaires
Onde stationnaire
Une onde stationnaire se déplaçant à la vitesse \(c\) est une solution particulière de la forme \(u(t,x)=U(x-ct)\). En posant \(z=x-ct\), \(U\) vérifie une équation différentielle ordinaire
\[U''+cU'+U(1-U)=0\]
On s'intéresse aux ondes stationnaires qui opèrent une transition entre les deux états d'équilibre \(U=1\) et \(U=0\) et vérifiant \(0\leq U\leq 1\).
On démontre que pour tout \(c\geq 2\) il existe une unique onde stationnaire se déplaçant à la vitesse \(c\). Pour \(c<2\) une telle onde n'existe pas.
Construction numérique : en raccordant les solutions des linéarisées autour des deux points d'équilibres et bien sûr odeint (à faire)
Propriété
Kolmogorov, Petrovskii et Piscounov (1937) ont démontré que pour toute donnée unitiale \(u_0\) vérifiant
\[u_0(x)=1 \quad\forall x\leq x_1, \qquad u_0(x)=1 \quad\forall x\geq x_2\]\[0\leq u_0(x)\leq 1\]
alors la solution \(u(x,t)\) converge quant \(t\) tend vers l'infini vers une onde stationnaire se déplaçant à la vitesse \(c=2\).
Avec Python, Numpy et Matplotlib
- schémas explicite, implicite
- mise en évidence de l'instabilité du schéma explicite
- effet régularisant du à la présence de \(u_{xx}\)
- évolution vers une onde stationnaire se déplaçant à la vitesse 2
Différences finies
On utilise les formules
\[\frac{\partial u}{\partial t}(t,x) \approx \frac{u(t+k,x)-u(t,x)}{k} \quad\text{progressive}\]\[\frac{\partial u}{\partial t}(t,x) \approx \frac{u(t,x)-u(t-k,x)}{k} \quad\text{retrograde}\]\[\frac{\partial^2 u}{\partial^2 x}(t,x)\approx \frac{u(t,x+h)-2 u(t,x)+
u(t,x-h)}{h^2}\]
On discrétise alors \([0,T]\times[-a,a]\) et non pas \(\mathbb{R}^+\times\mathbb{R}\) :
\[k=\Delta t= \frac{T}{M+1}, \quad h=\Delta x=\frac{2a}{N+1}\]\[t_{j}=jk \quad 0\leq j\leq M+1, \qquad x_{n}=a+nh\quad 0\leq n\leq N+1\]
Différences finies (suite)
On pose \(U_{j,n}\) avec \(0\leq j\leq M+1\) et \(0\leq n\leq N+1\) sensé être une approximation de \(u(t_j,x_n)\). Écrire l'EDP en \((t_j,x_n)\) avec les formules donnent plusieurs schémas (il y a plusieurs choix possibles entre la différence progressive, rétrograde ou une moyenne des deux) : explicite et implicite
\[\dfrac{U_{j+1,n}-U_{j,n}}{k} -\dfrac{U_{j,n+1}-2U_{j,n}+U_{j,n-1}}{h^{2}}= U_{j,n}(1-U_{j,n})\]\[\dfrac{U_{j,n}-U_{j-1,n}}{k} -\dfrac{U_{j,n+1}-2U_{j,n}+U_{j,n-1}}{h^{2}}= U_{j-1,n}(1-U_{j-1,n}).\]
Pour éviter d'avoir une équation non linéaire à résoudre dans le schéma implicite, le second membre est évalué en \(t_{j-1},x_n\).
Il faut pour boucler le système (et même l'EDP sur le domaine borné)
ajouter des conditions sur le bord. Pour faire simple nous prendrons
Dirichlet non homogène \(u(t,-a)=1\) et \(u(t,a)=0\), en
accord avec le théorème.
Matrice du problème de Dirichlet
La matrice \(A\) utilisée dans la suite appelée matrice de Dirichlet :
\[\begin{split}\begin{pmatrix}
2 & -1 &\; &\; &\; \cr
-1 &2 &-1 &\; &\; \cr
\: &\ddots &\ddots &\ddots &\; \cr
\: & \: &\ddots &\ddots & -1 \cr
\; &\; & \: &-1 &2 \cr
\end{pmatrix}\end{split}\]
Différences finies (forme matricielle)
Si \(U^{(j)}\) désigne le vecteur de taille \(N\) contenant \(U_{j,n}\) pour \(1\leq n\leq N\) on peut écrire les deux schémas sous forme matricielle
\[U^{(j+1)}=(I-\frac{k}{h^2}A)U^{(j)}+ k F^{(j)}\]\[\big(I+\frac{k}{h^{2}}A\big) U^{(j+1)}=U^{(j)} + k F^{(j)}\]
avec \(F^{j}_n= U_{j,n}(1-U_{j,n})\) si \(2\leq n\neq N\) et \(F^j_1= \frac{1}{h^2}+ U_{1,n}(1-U_{1,n})\)
Comme nous avons un problème d'évolution, la donnée initiale \(u_0\) initialise \(U^{(0)}\) avec \(U_{0,n}=u_0(x_n)\) : le premier schéma est dit explicite et le second implicite (à chaque étape on doit résoudre un système linéaire).
Consistance, stabilité et convergence
Comme pour les EDO on définit les notions de consistance, de stabilité et de convergence.
Le schéma explicite souffre d'un gros défaut : il est stable si et seulement si \(k\leq 2\) (\(k\) a vocation à devenir petit) et
\[\frac{k}{h^2} \leq \frac{1}{2}- \frac{k}{4}\]
Si le second membre de l'EDP est une donnée \(f\) (qui ne dépend pas de \(u\)) on a la condition CFL usuelle \(k/h^2\leq 1/2\). On demande donc un pas de temps très petit devant le pas d'espace.
Le schéma implicite est inconditionnellement stable (sous réserve ici d'avoir \(k<2\), ce qui est raisonnable).
Schéma explicite
Le code avec les créations de matrices particulières de Numpy
def schem_expl(y0,T,a,M,N):
dx, dt = 2*a/(N+1), T/(M+1)
A=2*np.diag(np.ones(N))-np.diag(np.ones(N-1),-1)-np.diag(np.ones(N-1),1)
G=np.eye(N)-dt/(dx**2)*A
Y=np.zeros((M+2,N+2))
tpt=np.linspace(0,T,M+2)
xpt=np.linspace(-a,a,N+2)
Y[0,:]=y0(xpt)
Y[:,0]=1
F=np.zeros(N)
for i in range(M+1):
F=Y[i,1:-1]*(1-Y[i,1:-1])
F[0]=F[0]+1/(dx**2)
Y[i+1,1:-1]=np.dot(G,Y[i,1:-1])+dt*F
return tpt, xpt, Y
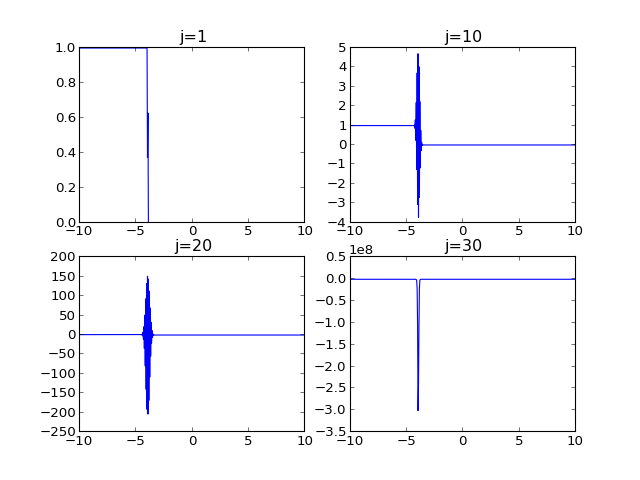
Schéma explicite : stabilité ?
schem_expl(y1,10,10,10000,500) (donne l'erreur overflow ...) avec donnée initiale discontinue 1 sur \(]-\infty,-4[\) et 0 ailleurs.
(Source code)
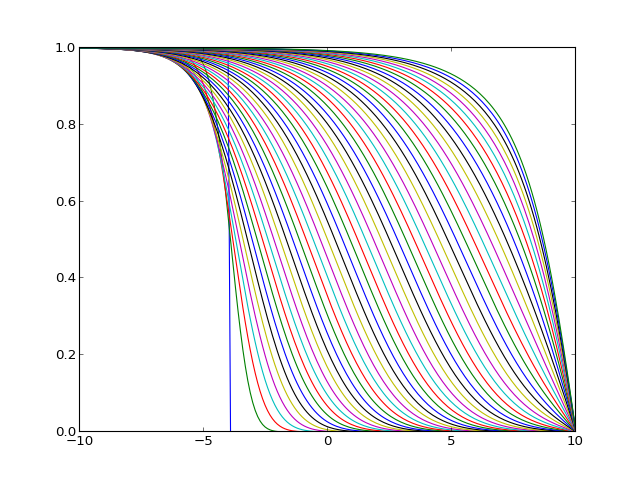
Schéma explicite : stabilité ?
schem_expl(y1,10,10,10000,200) avec un tracé sur une sélection de temps. Vers la fin, la progression de l'onde et la condition au limite imposée en \(a\) ne sont plus valides du point de vue du modèle.
(Source code)
Schéma implicite
Il suffit d'ajouter
from numpy.linalg import solve
def schem_impl(y0,T,a,M,N):
dx, dt = 2*a/(N+1), T/(M+1)
A=2*np.diag(np.ones(N))-np.diag(np.ones(N-1),-1)-np.diag(np.ones(N-1),1)
G=np.eye(N)+dt/(dx**2)*A
Y=np.zeros((M+2,N+2))
tpt=np.linspace(0,T,M+2)
xpt=np.linspace(-a,a,N+2)
Y[0,:]=y0(xpt)
Y[:,0]=1
F=np.zeros(N)
for i in range(M+1):
F=Y[i,1:-1]*(1-Y[i,1:-1])
F[0]=F[0]+1/(dx**2)
Y[i+1,1:-1]=solve(G, Y[i,1:-1]+dt*F) # résolution du système linéaire
return tpt, xpt, Y
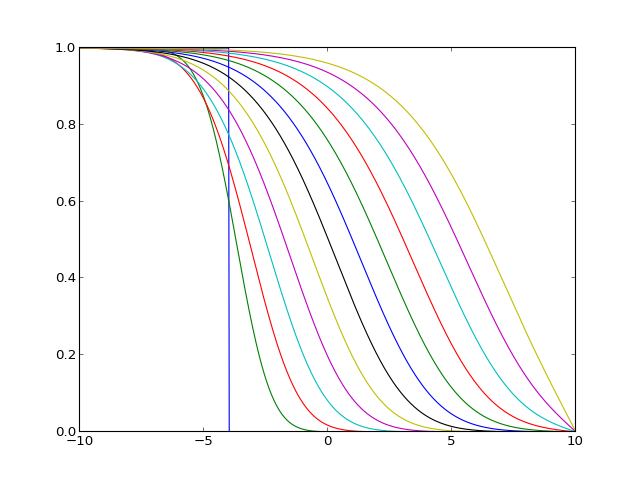
Schéma implicite : stabilité ?
schem_impl(y1,8,10,100,800) donne
(Source code)
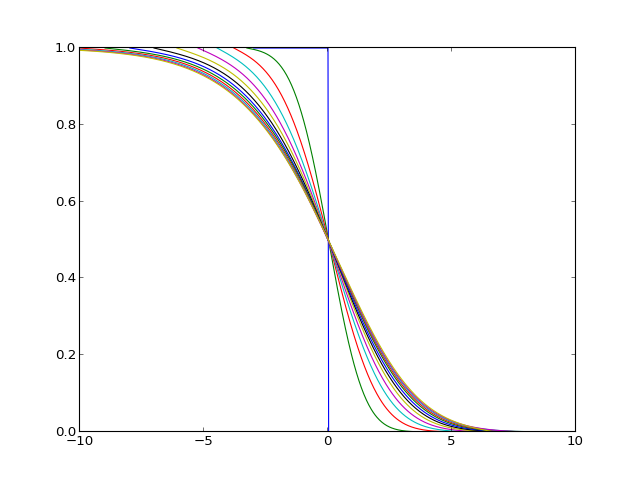
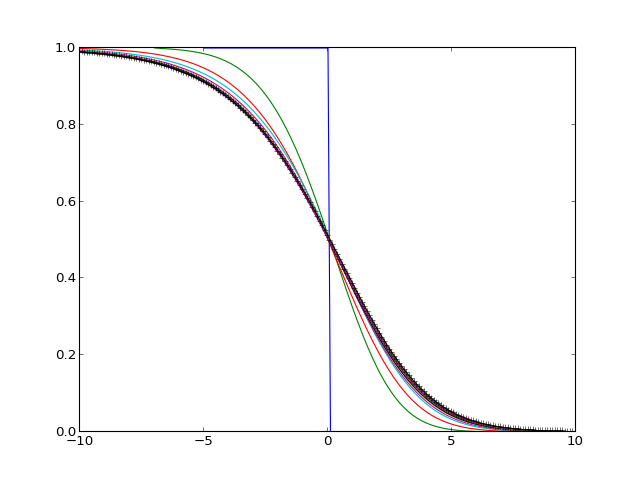
Saisir l'onde stationnaire
À l'aide du schéma implicite, pour visualiser la forme de l'onde :
- schéma implicite
- fenêtre suffisamment large par rapport au temps final de la simulation
- recentrage de la solution
def y1(x):
return np.ones(np.size(x))*[x<-7]
tpt, xpt, Y = schem_impl(y1,8,10,1000,800)
plt.axes(xlim=(-10,10),ylim=(0,1))
for i in range(0,tpt.size):
if i%80==0:
n=np.max(np.nonzero(Y[i,:]>=0.5))
xd=xpt[n]
plt.plot(xpt-xd,Y[i,:])
plt.show()
Onde stationnaire
tpt, xpt, Y = schem_impl(y1,8,10,1000,800)
(Source code)
Onde stationnaire
tpt, xpt, Y = schem_impl(y1,30,40,10000,800) sur la fenêtre \([-10,10]\) et tracé de l'approximation en \(T=20\) :
(Source code)
Exercices
- tracé d'une onde stationnaire par l'EDO en fonction de la vitesse
- superposition du tracé de l'onde stationnaire calculée pour \(c=2\) et de l'approximation de l'EDP recentrée
- étude de la stabilité de l'onde stationnaire
- schéma de Crank-Nicholson
- condition de Neumann sur le bord