Un modèle simple de corde élastique
Le modèle consiste en une chaîne de ressorts de même caractéristique et supposés idéaux (loi de Hooke).
- Numpy : vectorisation, méthode de Runge-Kutta d'order 4
- Matplotlib : graphique 2D et animation
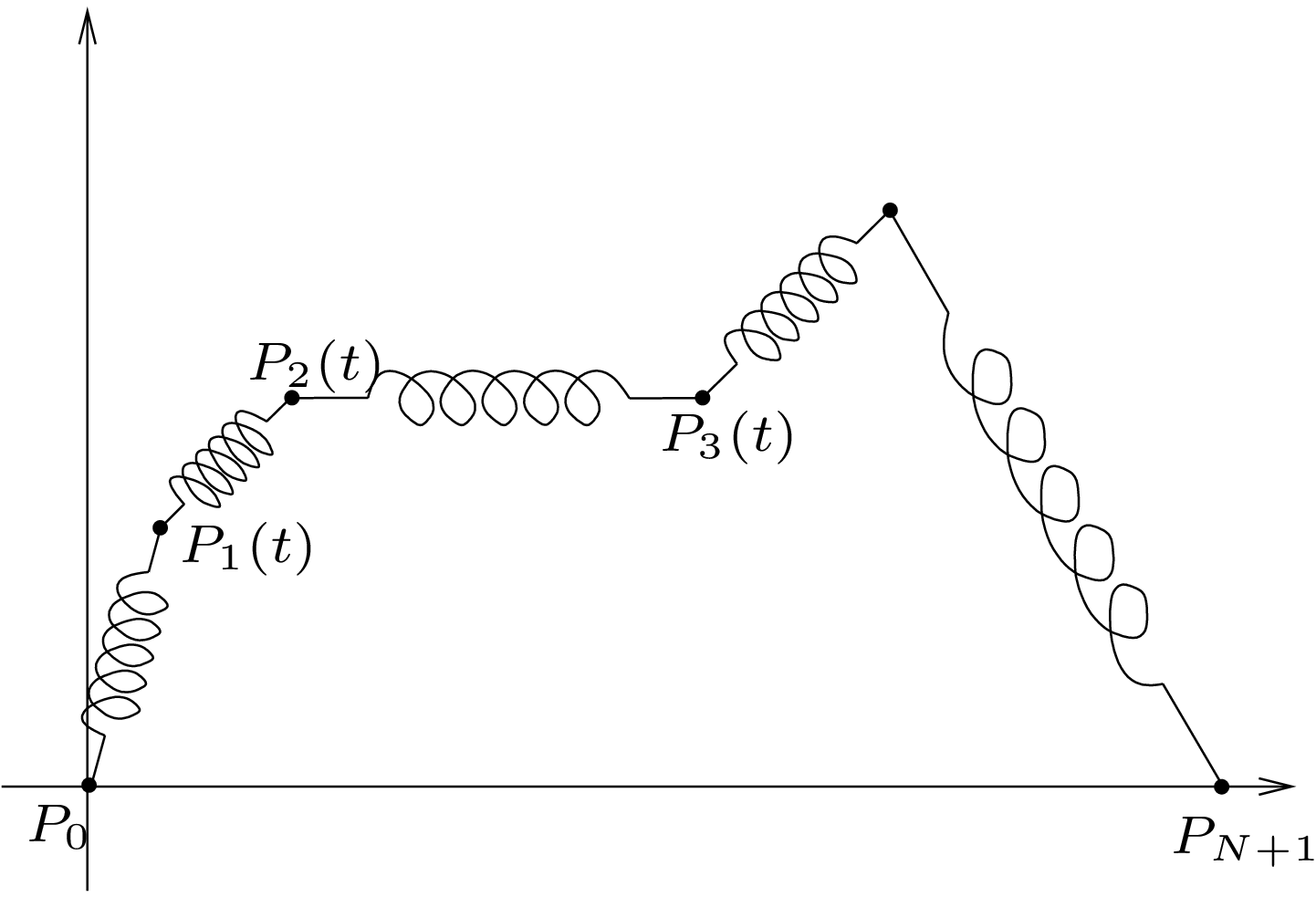
Le modèle consiste en une chaîne de ressorts de même caractéristique et supposés idéaux (loi de Hooke).
La chaîne est dans un plan. Les deux extrémités de la chaîne sont fixées à une même hauteur. On dispose de \(N+1\) ressorts donc \(N+2\) points. La loi de Hooke nous donne une équation différentielle d'ordre 2 pour les \(N\) points intérieurs. Chaque point ayant deux coordonnées on obtient un système différentiel du 1er ordre de dimension \(4*N\).
Loi de Hook : force dirigéee vers l'intérieur en compression et l'extérieur en extension de norme égale à
où \(l_0\) est la longueur du ressort au repos et \(k\) la constante de raideur au repos.
Hypothèse idéale : loi reste vraie pour toute valeur de \(l\).
La masse \(i\) est soumise à l'action de deux forces, \(f_{i,i-1}\) et \(f_{i,i+1}\). Donc
et la loi de Hook donne
En posant \(P_i(t)=(Y_{1,i}(t),Y_{2,i}(t))\), \(P_i'(t)=(Y_{3,i}(t),Y_{4,i}(t))\) on se ramène à un système de taille \(4N\)
Puis les 3ème et 4ème coordonnées
Au pire
pourrait se faire avec une boucle mais le programme sera lent pour \(N\) grand.
Pour le calcul de \(F\) la vectorisation Numpy
def fressort(Y):
global k,m,l0,e
Z=np.zeros_like(Y)
Z[0,:]=Y[2,:]
Z[1,:]=Y[3,:]
Ye=np.hstack((np.zeros((4,1)),Y,np.zeros((4,1))))
Ye[0,-1]=1
etap=np.sqrt((Ye[0,2:]-Y[0,:])**2+(Ye[1,2:]-Y[1,:])**2)
etam=np.sqrt((Ye[0,:-2]-Y[0,:])**2+(Ye[1,:-2]-Y[1,:])**2)
Z[2,:]=k/(m*l0)*((1-l0/etam)*(Ye[0,:-2]-Y[0,:])+(1-l0/etap)*(((Ye[0,2:]-Y[0,:]))))
Z[3,:]=k/(m*l0)*((1-l0/etam)*(Ye[1,:-2]-Y[1,:])+(1-l0/etap)*(((Ye[1,2:]-Y[1,:]))))
return Z
Un Runge-Kutta spécifique qui retourne la suite des valeurs \(Y_{1,i},Y_{2,i}\) toutes les 16 itérations
def myrk4(f,t0,T,y0,n):
dt, Y = T/n, y0
SYx=np.zeros((1+(n+1)//16,y0.shape[1]+2))
SYx[:,-1]=1
SYy=np.zeros((1+(n+1)//16,y0.shape[1]+2))
SYx[0,1:-1] , SYy[0,1:-1] = y0[0,:] , y0[1,:]
for i in range(n):
p1=f(Y)
Y2=Y+dt/2*p1
p2=f(Y2)
Y3=Y+dt/2*p2
p3=f(Y3)
Y4=Y+dt*p3
p4=f(Y4)
Y=Y+dt*(p1+2*p2+2*p3+p4)/6
if (i+1)%16==0:
SYx[(i+1)//16,1:-1]=Y[0]
SYy[(i+1)//16,1:-1]=Y[1]
return SYx,SYy
